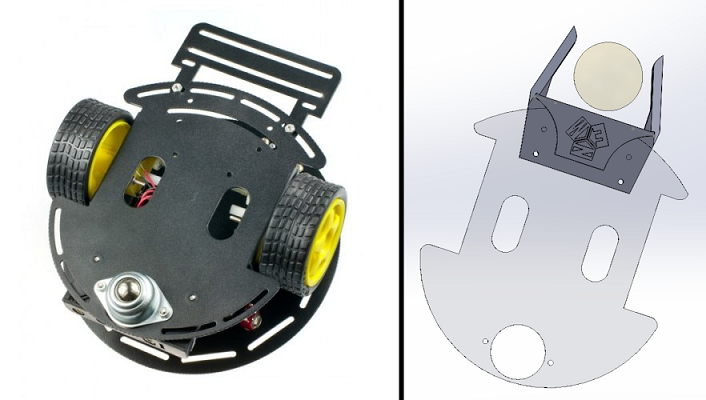
D’abord, nous avons dû recréer le châssis
du robot avec les bonnes mesures, pour ensuite
créer la pince. Puis, nous avons modélisé une
pince pouvant s’insérer dans le châssis et
pouvant s’adapter au mieux pour un jeu avec
une balle
Ici, la partie transparente en gris c’est le châssis, et la boule jaune transparente c’est la balle de jeu. Notre pince c’est la partie grise opaque, qui servira à intercepter et rediriger la balle vers les cages.
Ici, la partie transparente en gris c’est le châssis, et la boule jaune transparente c’est la balle de jeu. Notre pince c’est la partie grise opaque, qui servira à intercepter et rediriger la balle vers les cages.
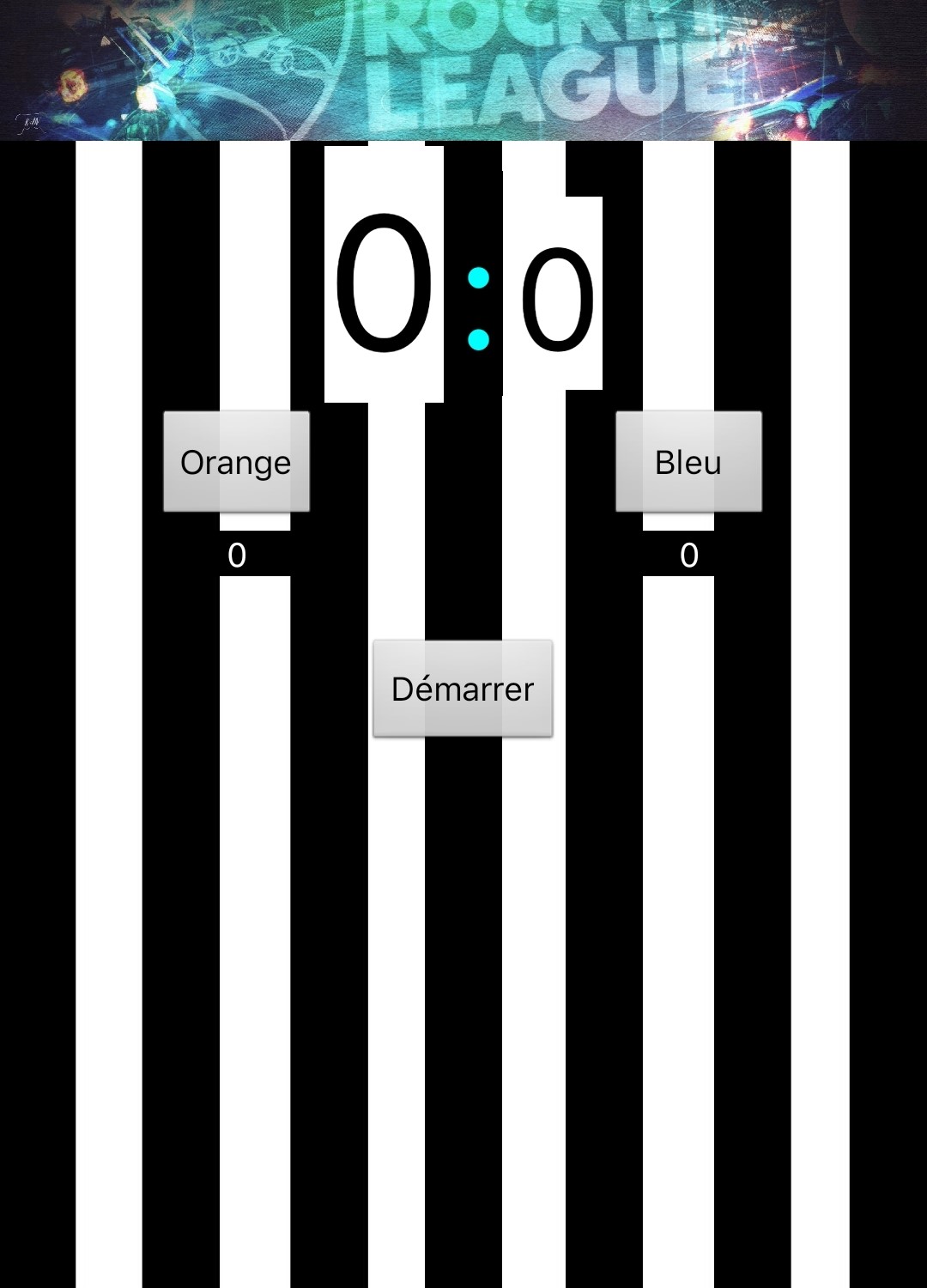 Mais aussi, pour le bon déroulement du jeu, nous avons créé une application gérant l'arbitrage.
Elle permet de : chronométrer la partie, compter les points à l’aide d’un bouton
et de jouer une musique lors de la victoire d’une équipe.
Mais aussi, pour le bon déroulement du jeu, nous avons créé une application gérant l'arbitrage.
Elle permet de : chronométrer la partie, compter les points à l’aide d’un bouton
et de jouer une musique lors de la victoire d’une équipe.